NVIDIA Jetson
In this tutorial, we will show you how to connect and use additional board computer, like NVIDIA Jetson or Raspberry Pi, on your rover.
If you want to build a resource heavy project, like one involving image recognition, object detection or speech processing, you might find Leo Rovers built-in Raspberry Pi to be quite restricting in case of processing power. In situations like this one, it's wise to attach an entire additional, preferably more powerful, computer to the rover. This allows you to run more resource-intensive processes while leaving the control of the rover to the Raspberry Pi.
What to expect?
The sheer amount of things you can do with a whole additional computer makes it almost impossible to show the possibilities. However, we can show you an example of our use case.
As a technical partner of the European Rover Challenge we had to create a Leo Rover with payload created entirely for the competition. The design of it proved to be too demanding for a simple Raspberry Pi. That's why the Leo Rover in ERC Spec had an additional Nvidia Jetson Xavier NX running the most demanding processes. This allowed the rover to, among others, run a ZED camera for spatial perception. You can learn more about the Leo Rover ERC configuration here: Leo Rover Blog - How did Leo Rover turn into a competition robot.
Mechanical integration
In order to connect additional computer to the Leo Rover you'll need to provide a way of connecting an ethernet cable straight into the built-in Raspberry PI of the rover. We've created a special MEB cover, that you can find here, with an opening for the cable can fit through.
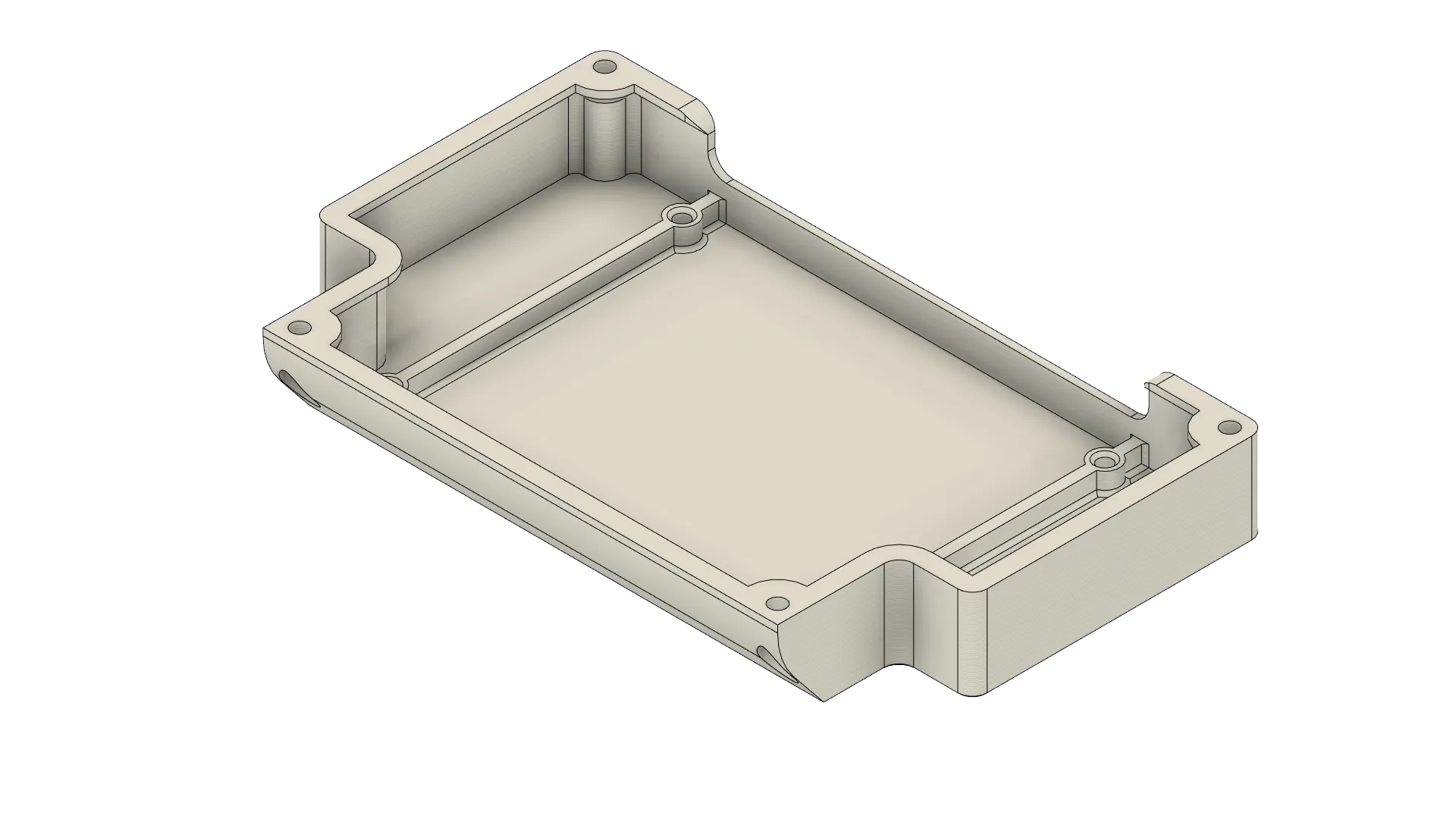
The process of changing the cover is really easy. Just unscrew the 4 screws holding the MEB cover, remove it, and fasten the new cover in place using the same screws you just removed.
Wiring and electronics connection
On board computer - additional computer connections
You need to connect your computer with Raspberry PI in the Main Electronics Box, with ethernet cable.

Power supply
For supplying power to your BC you need to provide power connection to rovers battery. Our proposed solution is a Powerbox addon.

It's a module that replaces Leo Rover right quarter and provides additional power sockets.
We will use one of this sockets, and connect our board computer to it, with special cable (you will need to make it on your own), here is an example for Jetson computer.

The cable needs to have correct pluggable terminal block (you get them with power box, but you can also buy them here).
You need to check what voltage your board computer needs, so you plug it in the correct power socket. PowerBox has two types of power sockets:
- 5V DC power socket (via 12V-5V 9A DC converter) - marked as 5V
- 12V DC power socket (directly from the battery) - marked as BAT
Software integration
There are no additional steps regarding the network configuration. Ethernet connection should work the same way as the wifi connection with the rover. The additional board computer will be given an IP address, and can be connected to the ROS network the same way as it's described in Connecting another computer to ROS network section of ROS Development:
If you want to check what ip address your board computer has, you can install nmap and use it to check the ip. To do so type on your rover
sudo apt install nmap
nmap 10.0.0.1/24
This will scan all ports from 10.0.0.1 to 10.0.0.255 and will print out the
used ones. In output there will be also address of Raspberry Pi, but you can
distinguish it from others, as it will have also line Nmap scan report for leo
(10.0.0.1)
The only thing you might need to do is to configure the board computer itself. You can find instruction for flashing the newest firmware here:
- video tutorial on how to use Raspberry PI imager, and link to download
- tutorial on flashing JetPack on NVIDIA Jetson computers
If you have some setup on your board computer, flashing it will remove all your configuration.
What next?
With a whole additional computer connected to your Leo Rover you can start projects requiring much more processing power than before. Check out our guide on Autonomous Navigation for one such example.