Powerbox

Introduction
The PowerBox module is the most recommended upgrade for the Leo Rover, replacing the right quarter to deliver four 12V DC power sockets, four 5V DC power sockets via a 12V-5V 9A converter, and an externally accessible battery socket. This module supports additional LiDARs, computers, and robotic arms, enables battery charging during operation, and allows for tethered power and seamless battery hot-swaps, ensuring continuous operation of the rover.
What's included
- 1 x Powerbox
- 8 x Phoenix Contact MSTB 2,5/ 2-ST-5,08
- 3 x ISO 7380-2 M5x10 screws
Referenced product

Powerbox
The Powerbox module significantly enhances Leo Rover's
capabilities by providing versatile power options and enabling continuous
operation through battery hot-swaps and external power access.
Main parameters
| Parameter | Value |
|---|---|
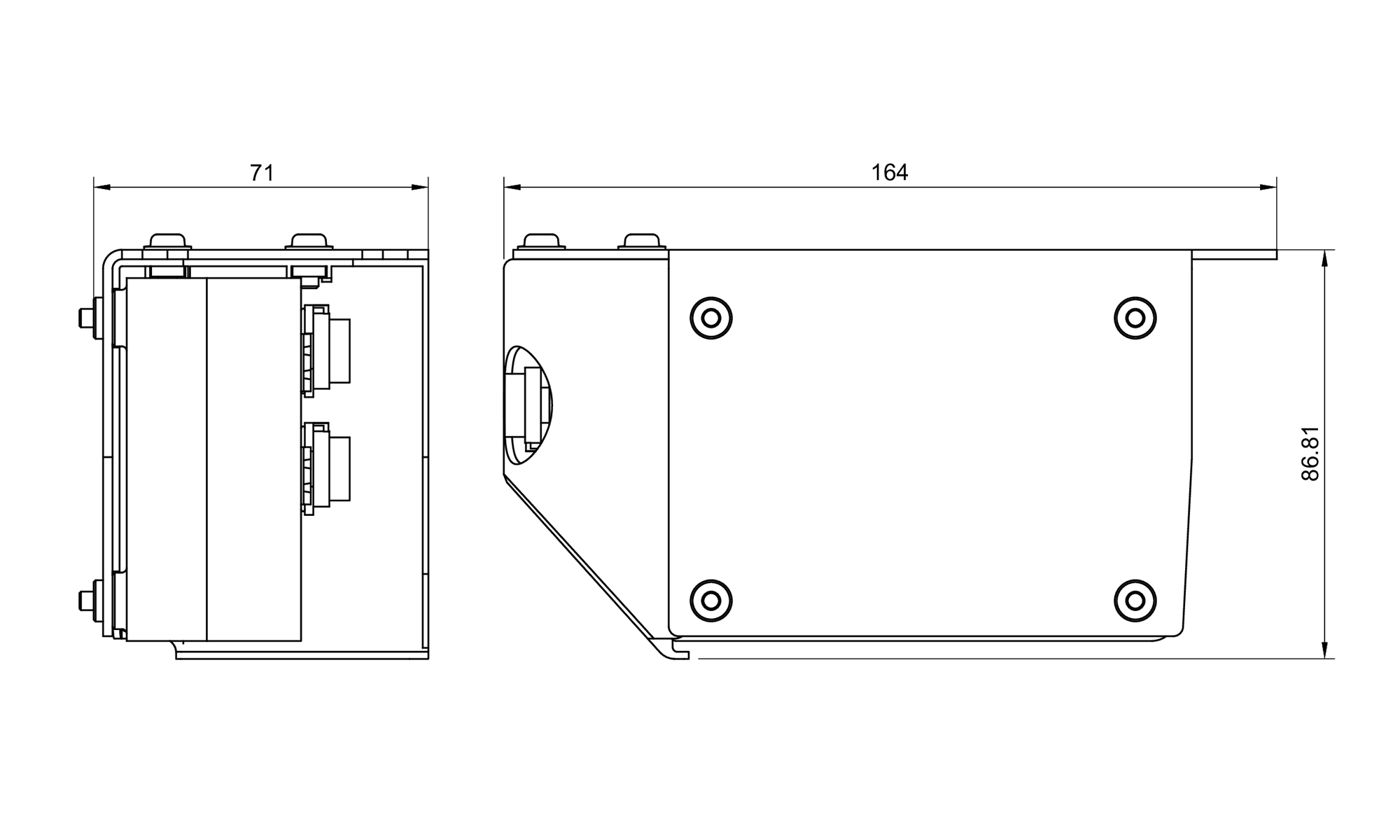
| Dimensions (LxWxH) | 164 mm x 71 mm x 87 mm |
| Weight | TBD |
| Main materials | PLA, aluminum |
| Mounting screws | 3 x M5 x 10 ISO 7380-2 |
| BAT (12V) outputs | 4 |
| BAT output max power | 144 W (12 A) each |
| 5V outputs | 4 |
| 5V outputs max power | 60 W (9 A) total |
| External battery connectors | 1 |
Hardware specification
Dimensions
CAD model

3D CAD model in neutral format is also available on our Google Drive:
🔗Powerbox - Google Drive
Components
| Name | Quantity | Description | Link |
|---|---|---|---|
| 12V-5V step-down voltage regulator | 1 | Pololu D24V90F5 synchronous switching step-down regulator. Takes an input voltage of up to 38 V and efficiently reduces it to 5 V with an available output current of around 9 A. | pololu.com |
| 5V connector | 4 | Phoenix Contact MSTB 2,5/ 2-ST-5,08 | phoenixcontact.com |
| BAT (12V) connector | 4 | Phoenix Contact MSTB 2,5/ 2-ST-5,08 | phoenixcontact.com |
| External battery connector | 1 | Weipu SP1312-S3 | weipu.com |
| Powerbox-MEB connector | 1 | Weipu SP1312-S3 | weipu.com |
| Powerbox-battery connector | 1 | Weipu SP1312-P3 | weipu.com |
Possible applications
With Powerbox you are able to:
- connect additional LiDARs, computers (such as Jetson Nano, Jetson Xavier NX, etc.), robotic arms (PhantomX Pincher, WidowX, etc.),
- charge the Rover battery during its operation,
- power the Rover via tether,
- perform battery hot-swap - where you keep the Rover operational using the standard battery charger during the battery swap.