Scratch 3.0
This tutorial will show you how to program Leo Rover using Scratch 3.0 programming interface.
Scratch is a block-based visual programming language dedicated to education. It's taught and used in schools and other educational institutions as one of the best ways to begin your programming adventure. You don't need any knowledge about software to start using it and it's easy to edit, yet provides all the basic functionalities of Leo Rover.
You can get more information about Scratch here
What to expect?
Here is an example of using Scratch with Leo Rover:
Prerequisites
Software integration
Launching Scratch 3.0 Online Editor
First, you need to connect Leo Rover to the internet, and then connect to the robot's access point (see prerequisites).
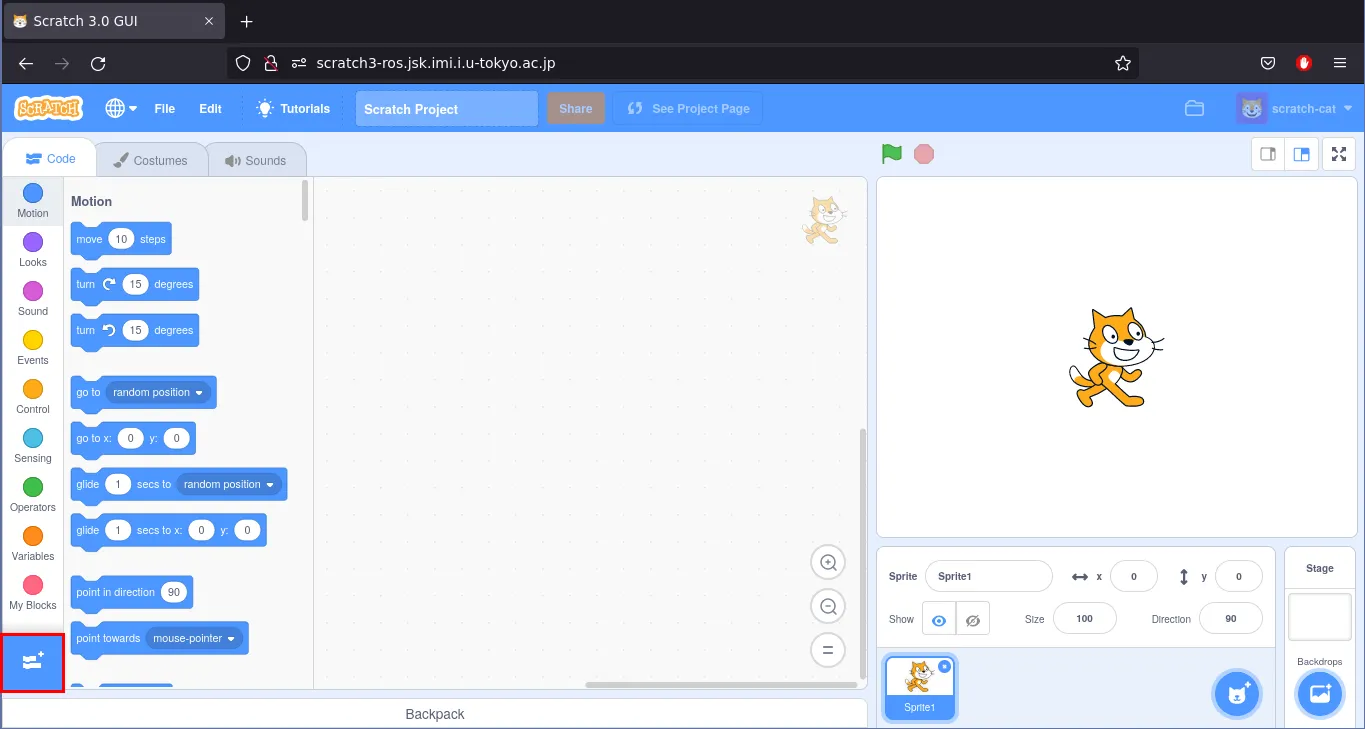
When connected to the rover's access point, you can launch Scratch 3.0 GUI.
To launch it, just enter this link.
When the page loads, you should see something like this:

Adding ROS Extension
To program Leo Rover using Scratch, we need to add the ROS extension to the GUI.
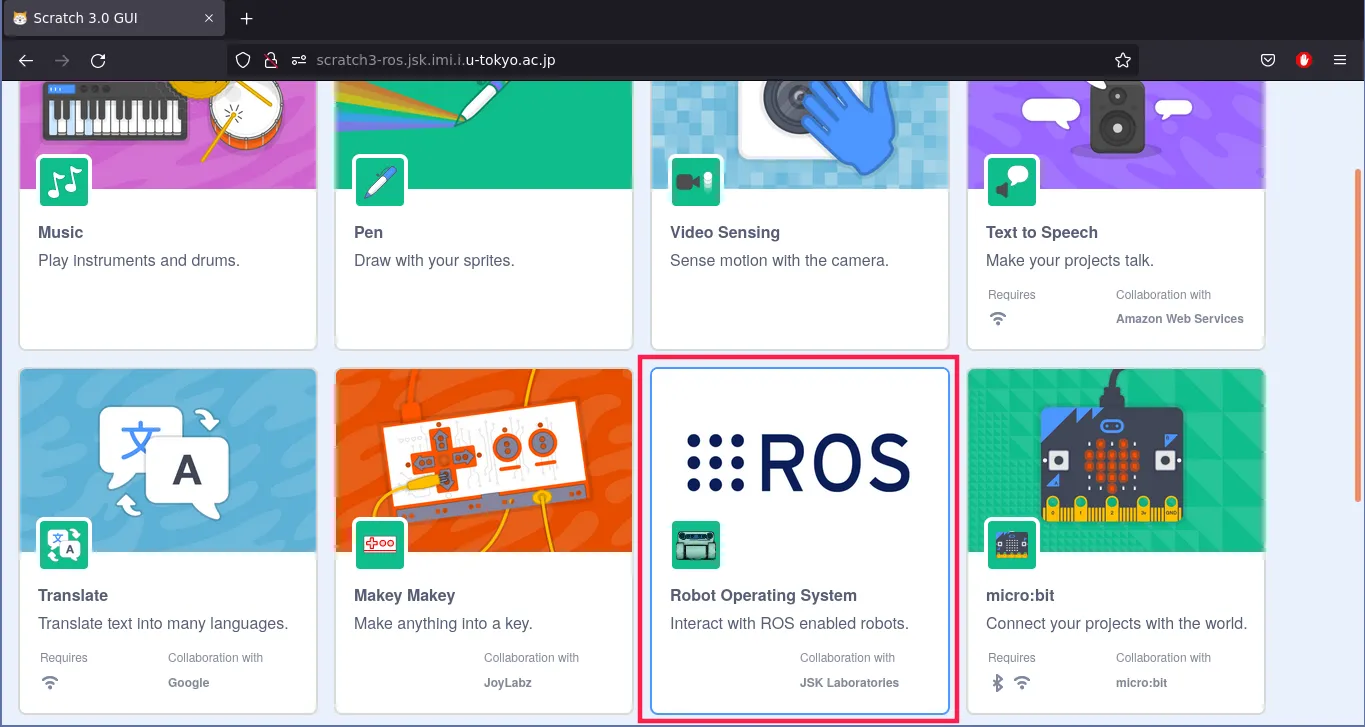
Click the Add Extension button in the bottom left corner. You will see all the extensions.
Find and click Robot Operating System.
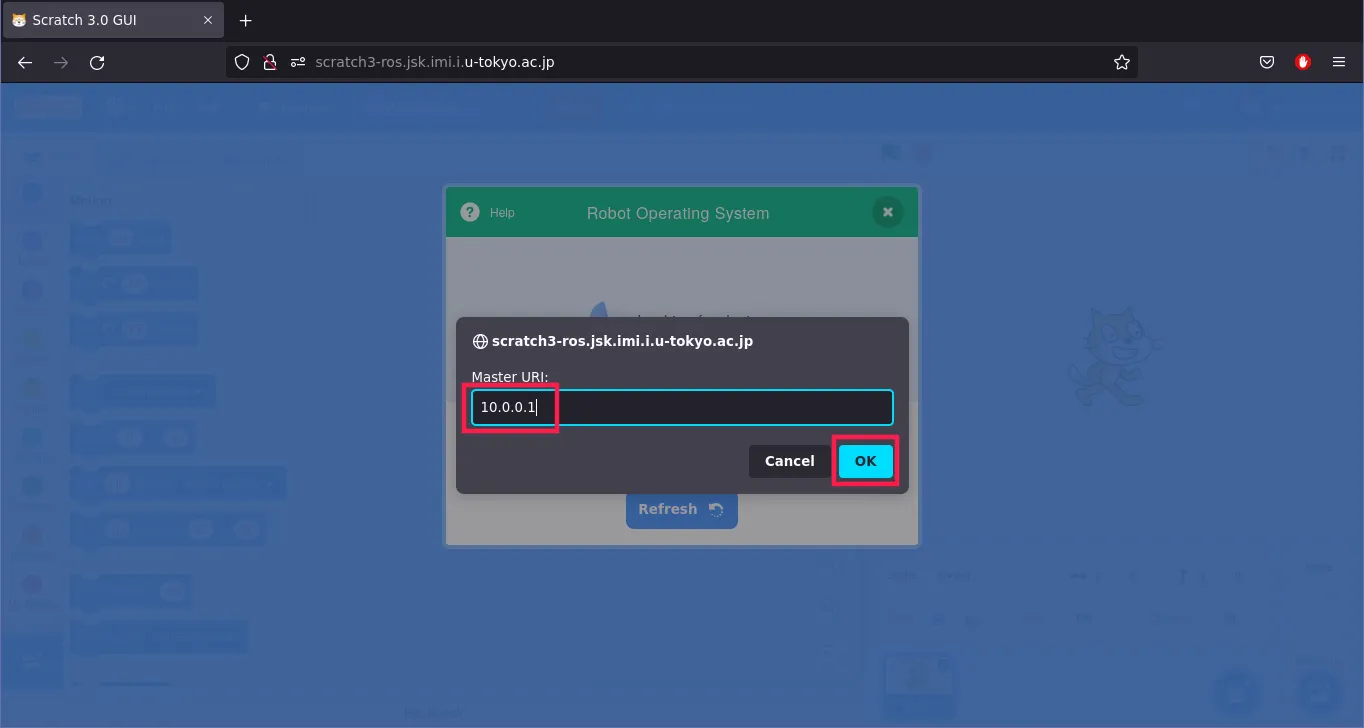
Then, in the Master URI field, type the rover's IP address (default
10.0.0.1) and press OK.
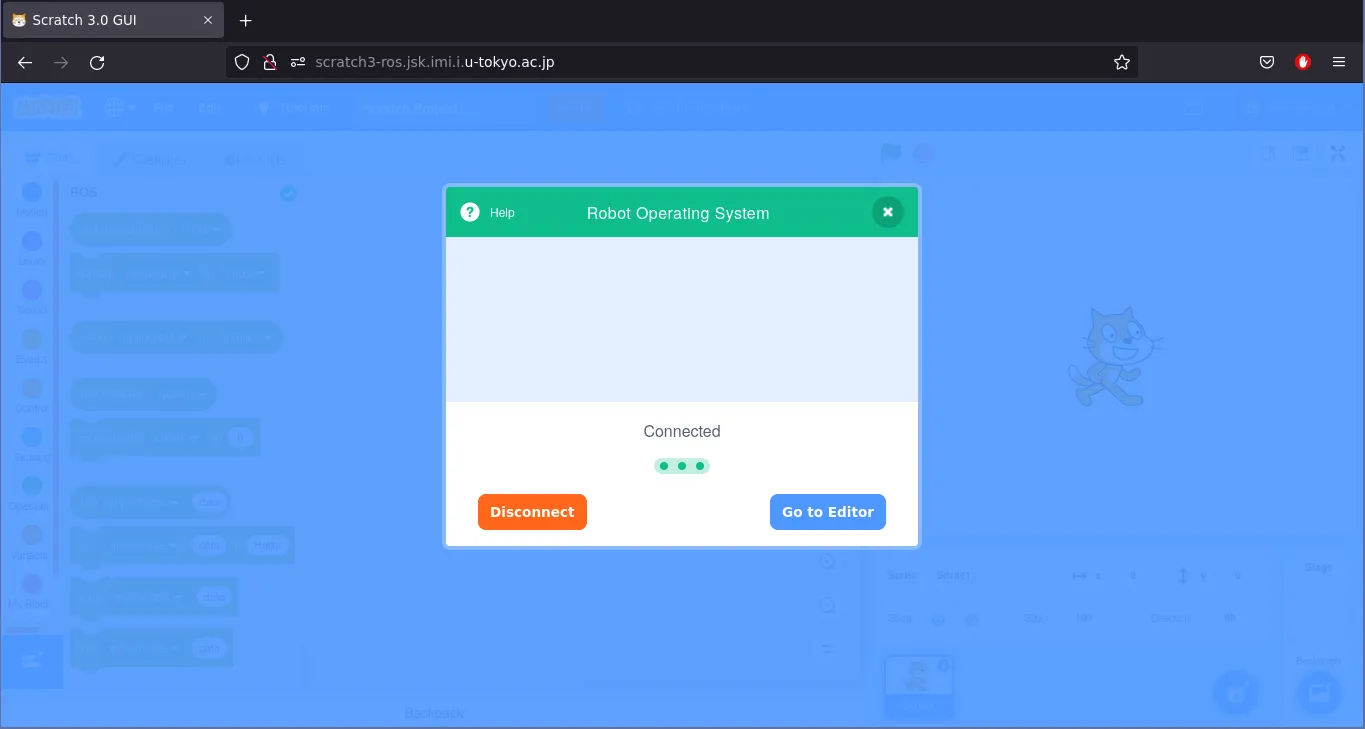
If everything is ok, you should see something like this. Just click Go to Editor and you are good to go.
Examples
Drive Leo Rover with arrows
We created an example Scratch project to help you understand the language.
Background
- To make Leo Rover move, we need to publish message on the
/cmd_veltopic. /cmd_veltopic takes messages of type geometry_msgs/Twist. We will need only thelinear.xandangular.zfields, as those are the only axes that Leo Rover moves across.
Implementation
If you decide to name variables, or functions different than it is in this tutorial, you will need to pay attention more, as instructions for you will be slightly different.
As we are going to drive Leo Rover with arrows, we need to do similar things for all 4 arrows. To work smarter, not harder, first, we will make a function that tells the rover to drive and rotate with given speed values.
Drive Function
Start by defining new block. To do so, select from the left side of the screen My Block panel and press Make a Block.
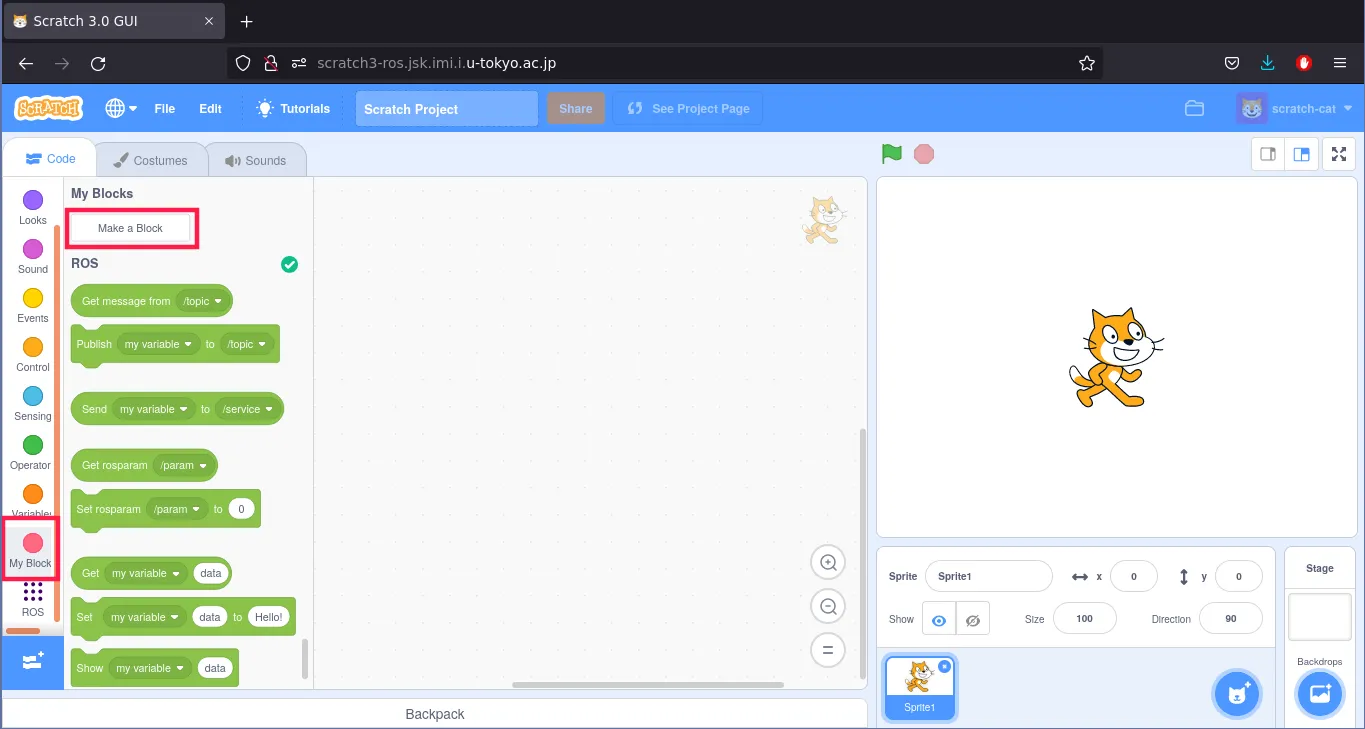
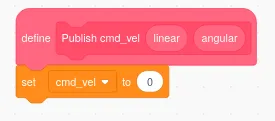
In the name write Publish cmd_vel, or any other name you want to call your
function. Then add two input fields of type number or text. Name the first one
linear, and the second angular and press OK. In the end, the block should
look like this:
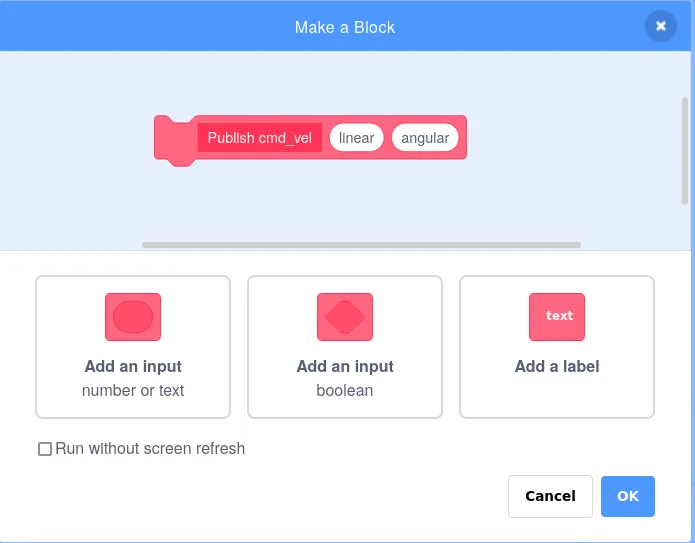
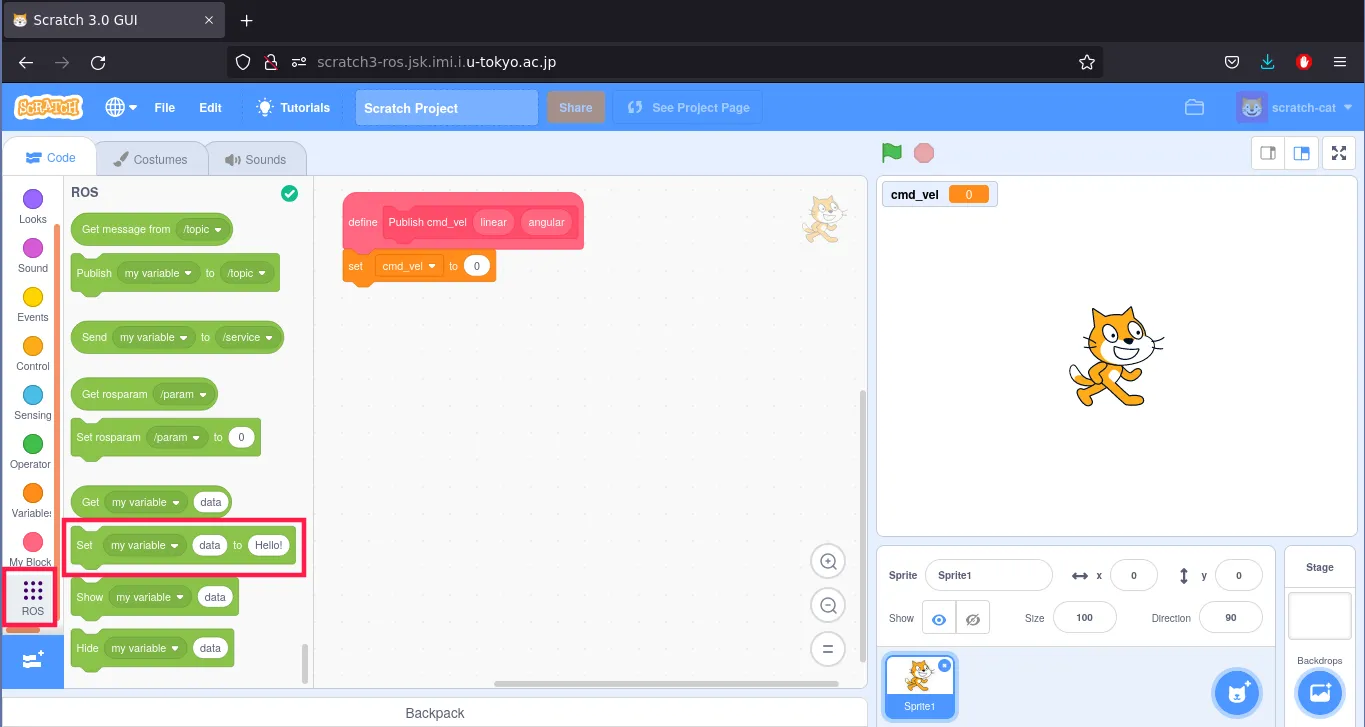
Now we need to make our variable, which will get the values from function, and
will be published to the /cmd_vel topic. Similarly to making a new block,
select from the panel on the left Variables and then Make a Variable.
Name it cmd_vel or any other way, and press OK.
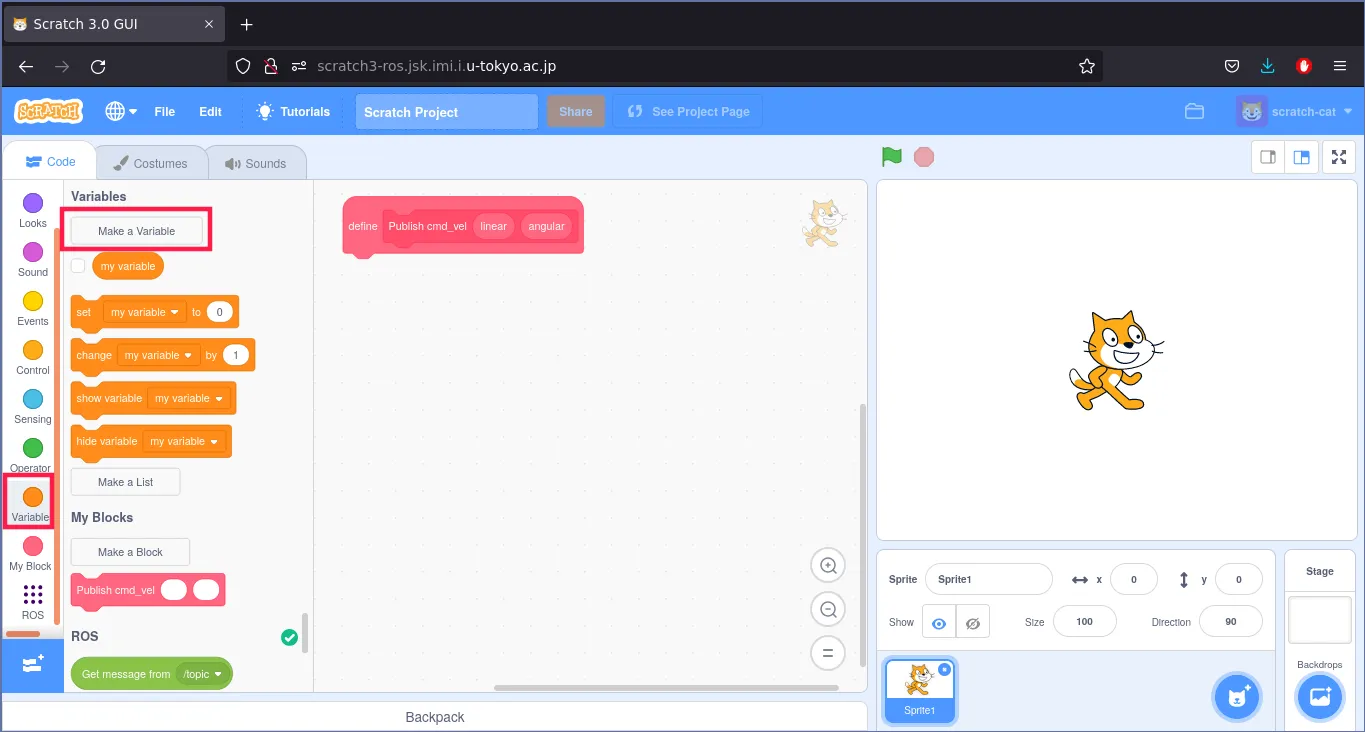
We need to reset our variable before publishing, so we need to add Set block
from Variables panel, to our Publish cmd_vel block. From the list choose
your variable (in our case cmd_vel) and for the value type 0.
After those steps our function should look like this:
Now, we need to store the value from linear and angular fields (function
input) in our variable. As we have said in the background, /cmd_vel topic
takes message of given type. To make it work with our variable, we can't use
again Set block from Variables panel. We need to do it with the Set
block, but from ROS panel. This block, will guarantee us, that the value
from linear and angular fields will go to the corresponding fields from the ROS
message (linear.x and angular.z).
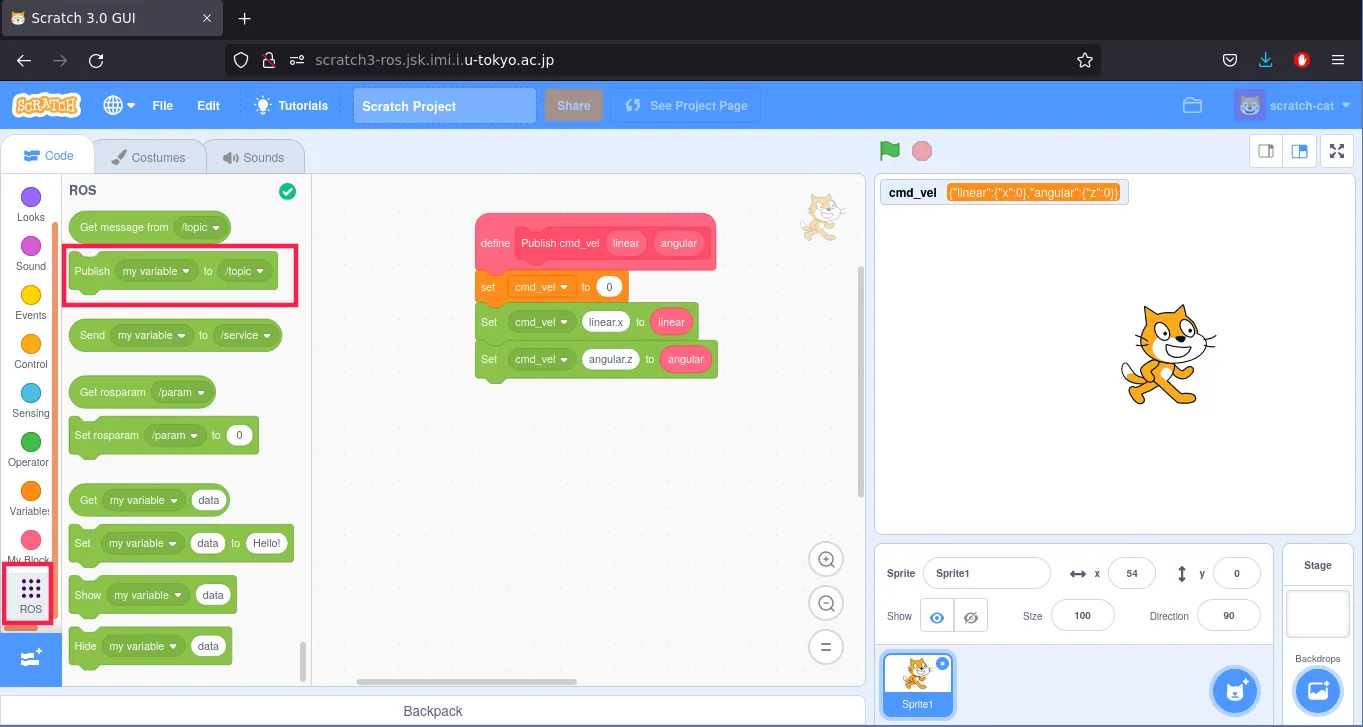
So from the ROS panel pick Set block, and add it to function twice (we
have two inputs in our function).
Now, we need to fill those blocks. For the variable we obviously pick cmd_vel.
Now we need to specify the data which will be set in each of these Set blocks.
One should be linear.x and the other angular.z.
Now we need to fill the value fields with corresponding input fields. So drag and drop input fields from the function in the correct places. This is how your function should look like at this moment:

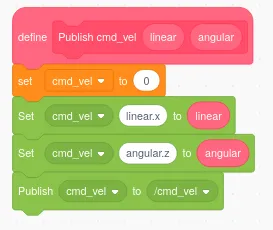
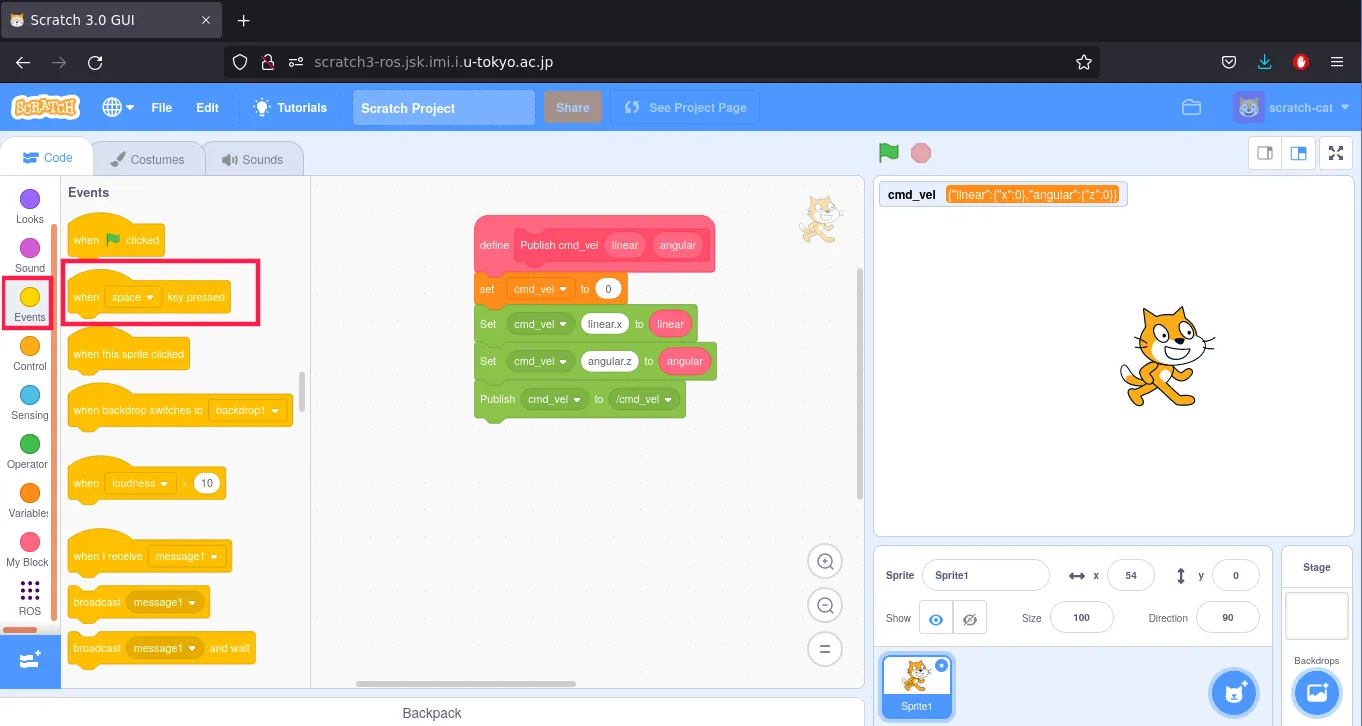
So we have our message. Now we need to publish it on the /cmd_vel topic. To do
this, we need to add to our function Publish block from ROS panel.
Now we need to fill this block. We pick our cmd_vel variable, and /cmd_vel
topic from all available topics. In the end our function looks like this:
Connecting the function with arrows
As we have the drive function ready, we need to implement the driving with
arrows. To do so, we need to catch when the arrow is pressed, and for each press
we need to call our Publish cmd_vel function.
To do so, we are going to use When <key> is pressed block from Events
panel. We need to pick four of those blocks, as there are four arrow keys.
Replace Space with left, right, up and down arrow. Now, for each of those
blocks, we need to add our function. You can find it in the My Block panel.
The only thing that is left is filling the input fields in the functions. We need to pick the values carefully so that Leo Rover performs correct actions on arrows (up/down - driving forward/backward, left/down - rotating left/right). Here are the values that we have filled:
| Arrow key | Linear value | Angular Value |
|---|---|---|
| up arrow | 0.5 | 0 |
| down arrow | -0.5 | 0 |
| right arrow | 0 | -1.2 |
| left arrow | 0 | 1.2 |
Values in the Linear Value column are given in meters per second. Positive
value means that Rover will drive forward, negative means that it will drive
backwards. Values in the Angular Value column are given in radians per second.
Positive value means that Rover will rotate left, negative value means that it
will rotate right.
Changing the values will result in the Rover driving / rotating faster or slower.
Now, you can press the arrow keys having the Scratch GUI open, and the rover should move.
Make sure that the ROS extension is connected with the rover. You can check if it is connected by clicking the icon next to ROS panel header.
If it's disconnected, you can establish connection once again by pressing the icon, and providing the Master URI (Rover's IP address).
What next?
Now, with the tutorial completed you may be wondering what to do next. Check out ARtag and line followers if you want to see the Leo Rover move on its own. You can also visit our site for other tutorials.