How to Integrate Mecanum Wheels
Mecanum wheels are a common way of giving mobile robots holonomic motion abilities. While not flawless e.g., difficult terrain traversal with mecanum wheels is much more difficult, mounting mecanum wheels to Leo Rover comes with many benefits, with the most important being:
- Ability to strafe.
- Great reduction in resistances seen while driving (especially when turning).
- Chance to mount heavier payload.
What to expect?
Having finished the tutorial you'll know how to convert Leo Rover to holonomic motion mode.

Referenced products
List of components
- 4 x Mecanum wheel (2 for each roller orientation)
- 4 x Mecanum torque plate
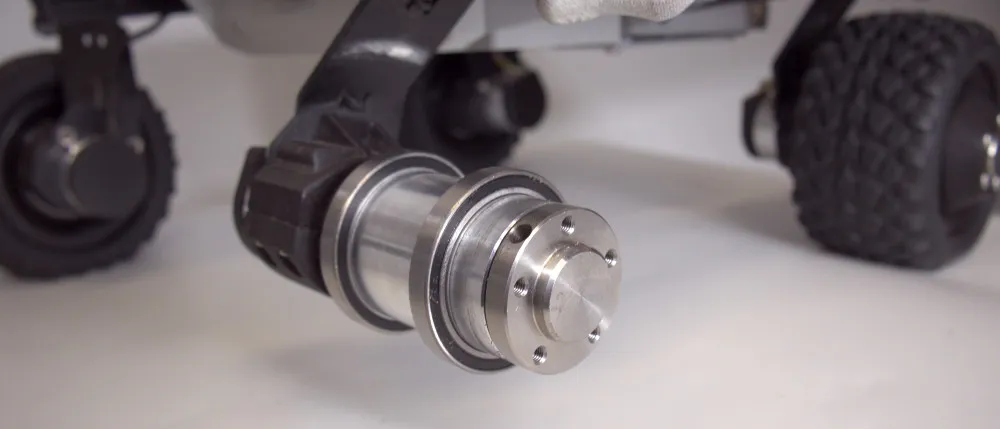
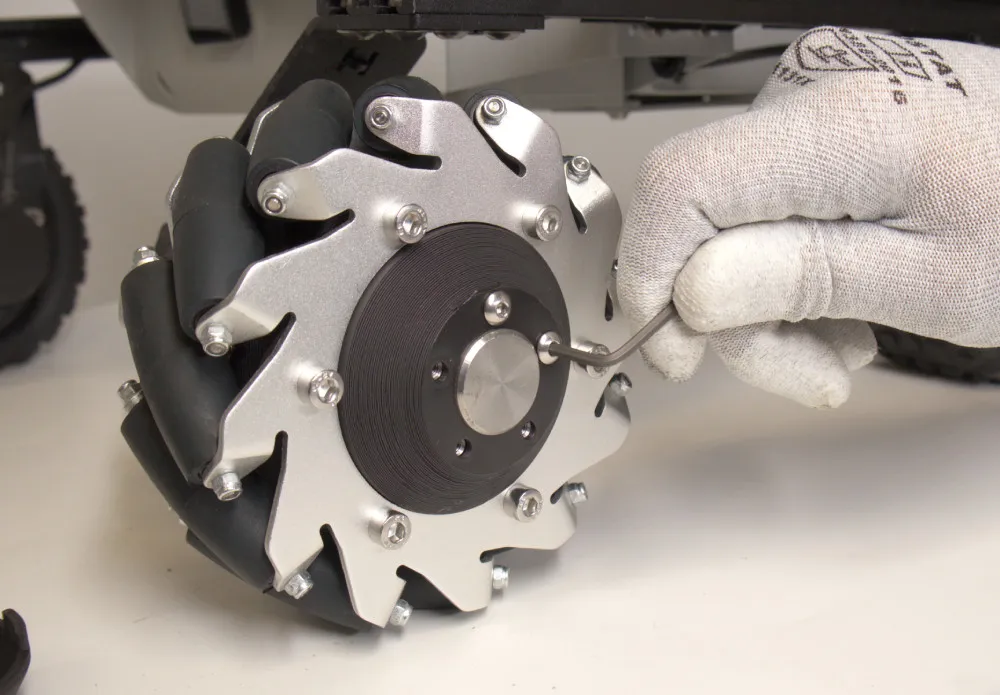
Mechanical integration
There are two ways mecanum wheels can be arranged:
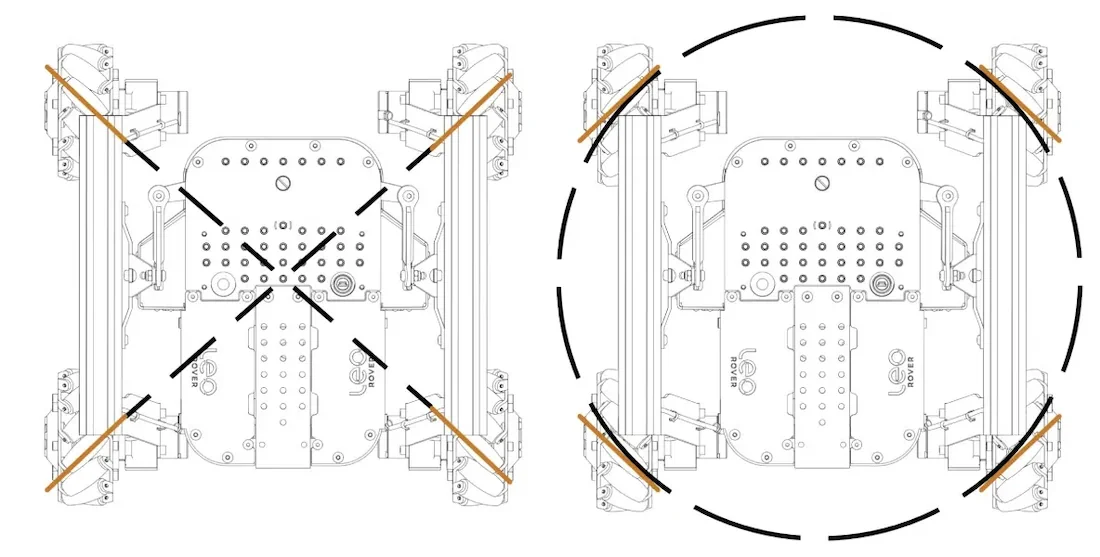
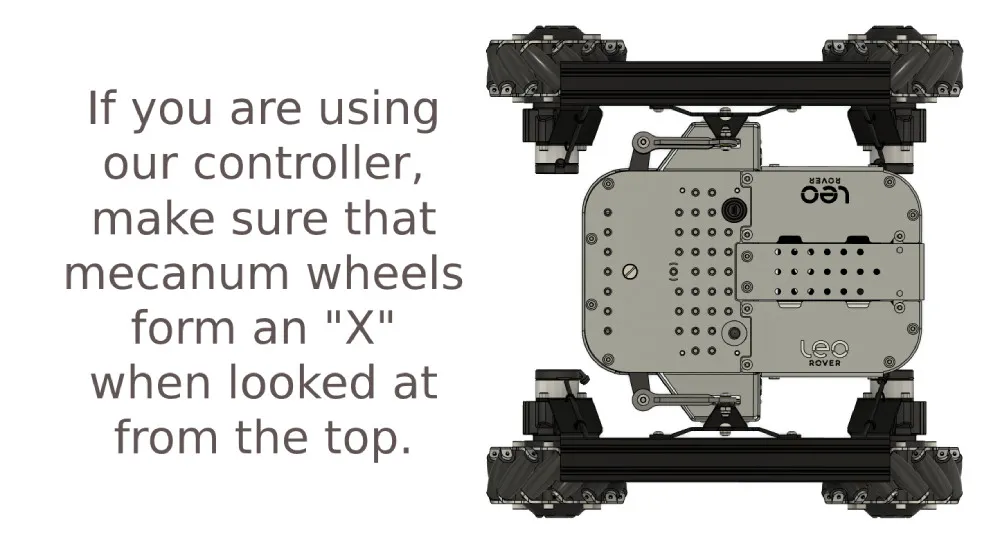
While both configurations can work, “X” from the top seems to be more prevalent in robotics as it makes turning around the center more consistent. That's why software we provide assumes the „X” configuration is being used.



Software integration
Adding the wheels to the software is really simple. You only need to change a
single thing in one file and restart the rover. In /etc/ros/setup.bash file
there is one environment variable MECANUM_WHEELS that is exported to the
system. You need to change its value to true:
export MECANUM_WHEELS=true
You can edit the file using this command:
nano /etc/ros/setup.bash
And then save its content with Ctrl+O and confirming with enter. You exit the program with Ctrl+X.
Once it's done, you can just reboot the rover, and the wheels will be included in the software running on the robot.
Examples
Visualize Robot Model
If you have ROS 2 installed on your computer, you can visualize the robot model with the mecanum wheels attached in RViz.
If you are not yet familiar with ROS 2, you can check out the guides below:
Make sure you have the leo_description package installed on your computer. To
install it, run:
sudo apt install ros-${ROS_DISTRO}-leo-description
To see the model, start rviz2, and add robot model in the display
view. Chose also base_footprint as fixed frame, and you should see the
rover model with mecanum wheels attached.
