

Focus on Innovation, Not Construction.
Raph Rover Overview
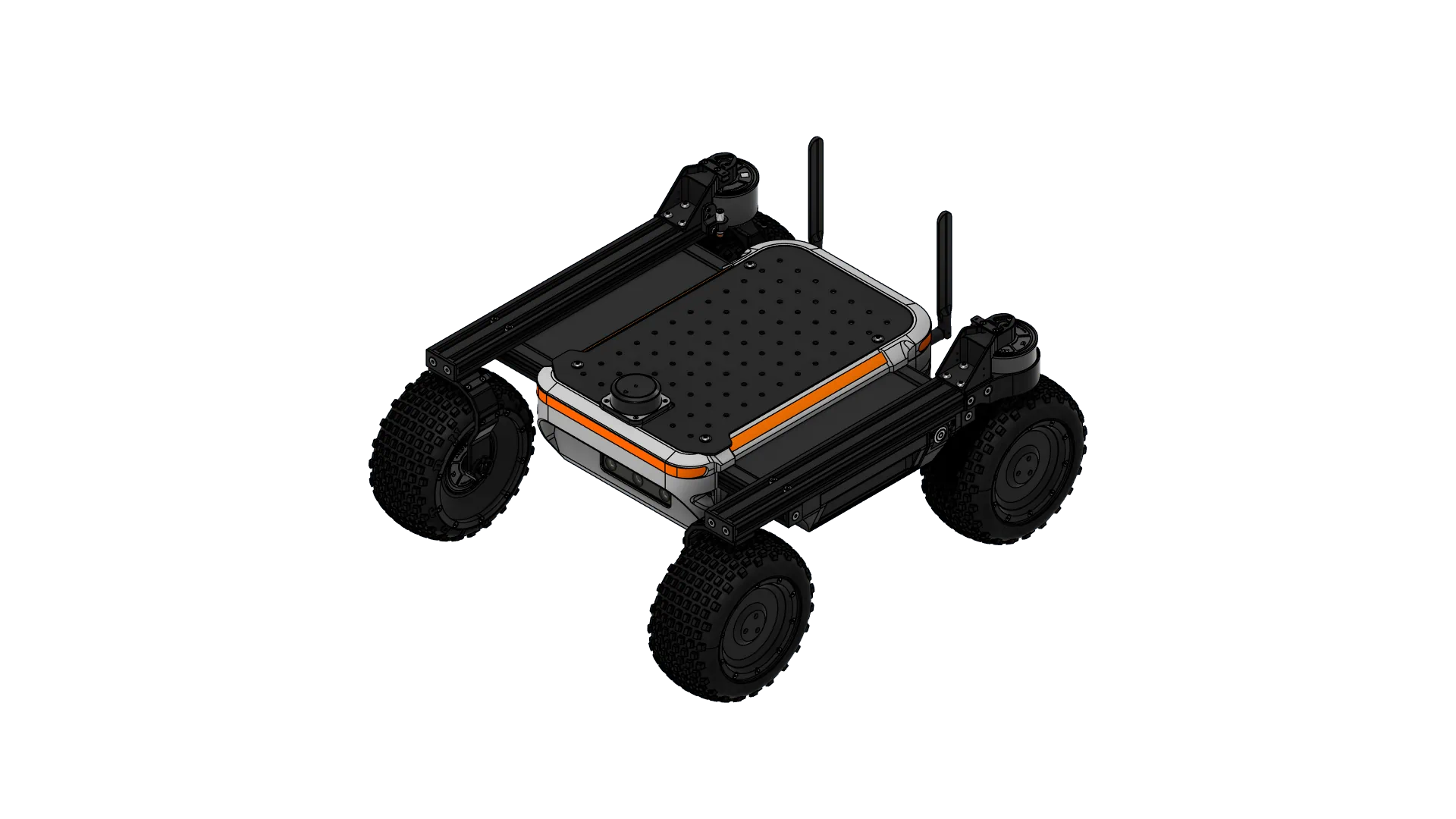
Raph Rover is a fully integrated, ROS 2-based R&D platform designed for one purpose: to drastically accelerate your work. Focus on innovation and algorithms, and leave the tedious hardware and software configuration to us.

Focus on Innovation, Not Construction
As an engineer or a scientist, your time is invaluable. Raph Rover was created to protect it.
Fully Configured ROS 2
You use an industry-standard, eliminating the need to learn proprietary systems.
Benefit for you: You don't waste weeks on tedious installations. You leverage your existing ROS skills to focus on innovative algorithms, which directly accelerates your research.
Out-of-the-Box Autonomy
The robot is capable of autonomous operation right after startup.
Benefit for you: Instead of spending weeks configuring basic navigation, you can launch autonomous environment mapping within the first hour. Your project starts at full throttle.
Modular Architecture
It allows for simple and fast integration of additional equipment.
Benefit for you: Seamlessly integrate your own 3D cameras, grippers, or sensors. The platform adapts to your project, not the other way around, giving you complete freedom.
Main features
architecture
Open source
Dual band Wi-Fi
Dual battery
Hot-swappable battery
Stereo camera
Lidar
ROS 2 supported
10 kg payload
All-terrain capable
Autonomy ready
Silent
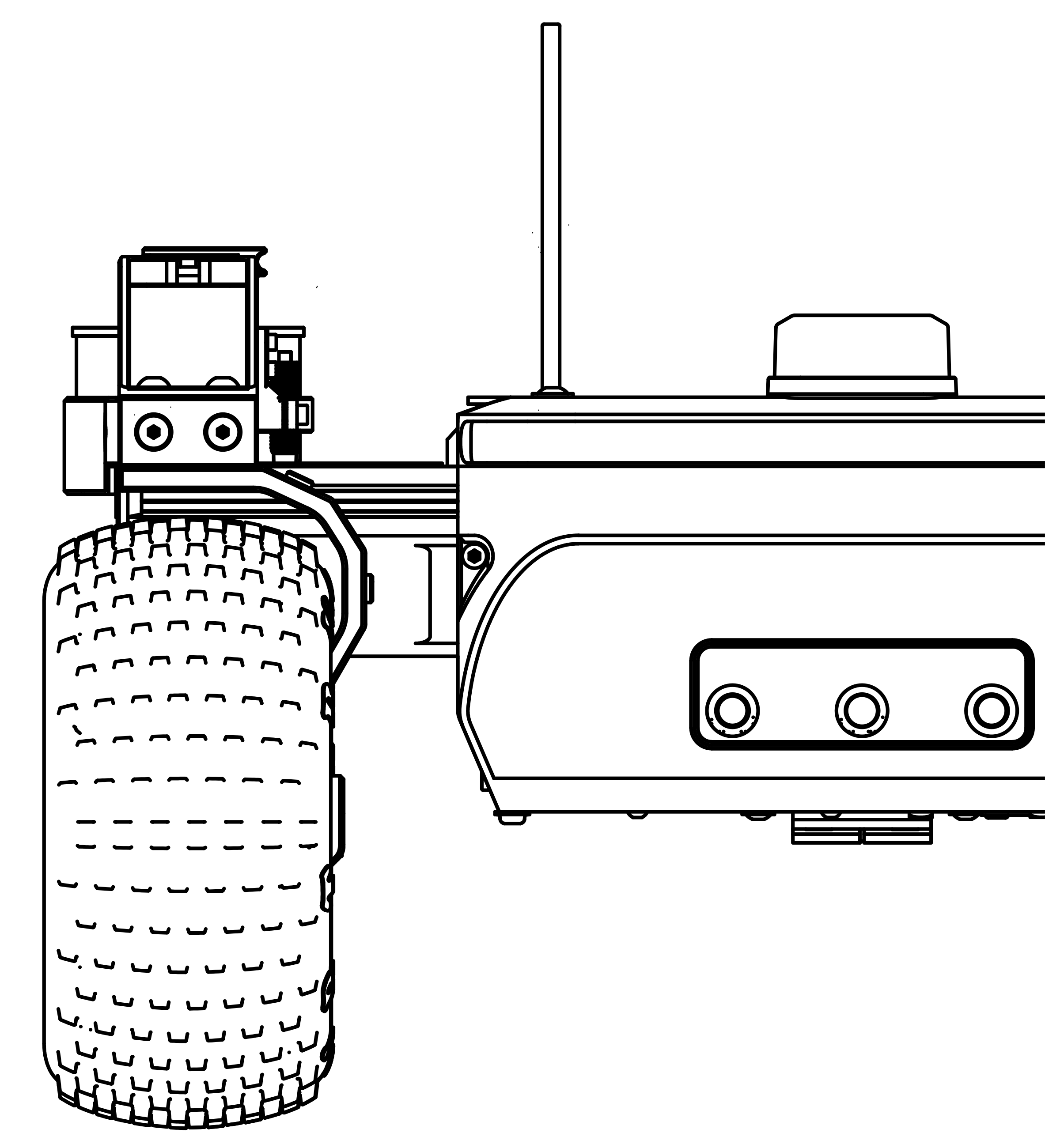
Designed for Rapid Development
Every mechanical detail is crafted to accelerate your workflow.

Built for Real-World R&D
Raph Rover's durable aluminum frame and spacious mounting plate provide a robust and flexible foundation for your custom hardware. Easily accessible I/O ports and power rails mean you spend less time with a soldering iron and more time developing your application.
Integrated Perception, Ready to Go
The strategically placed 360° Lidar and front-facing 3D camera provide a comprehensive view of the environment from day one. All sensors are pre-calibrated and fully integrated within the ROS 2 ecosystem, saving you weeks of complex setup.

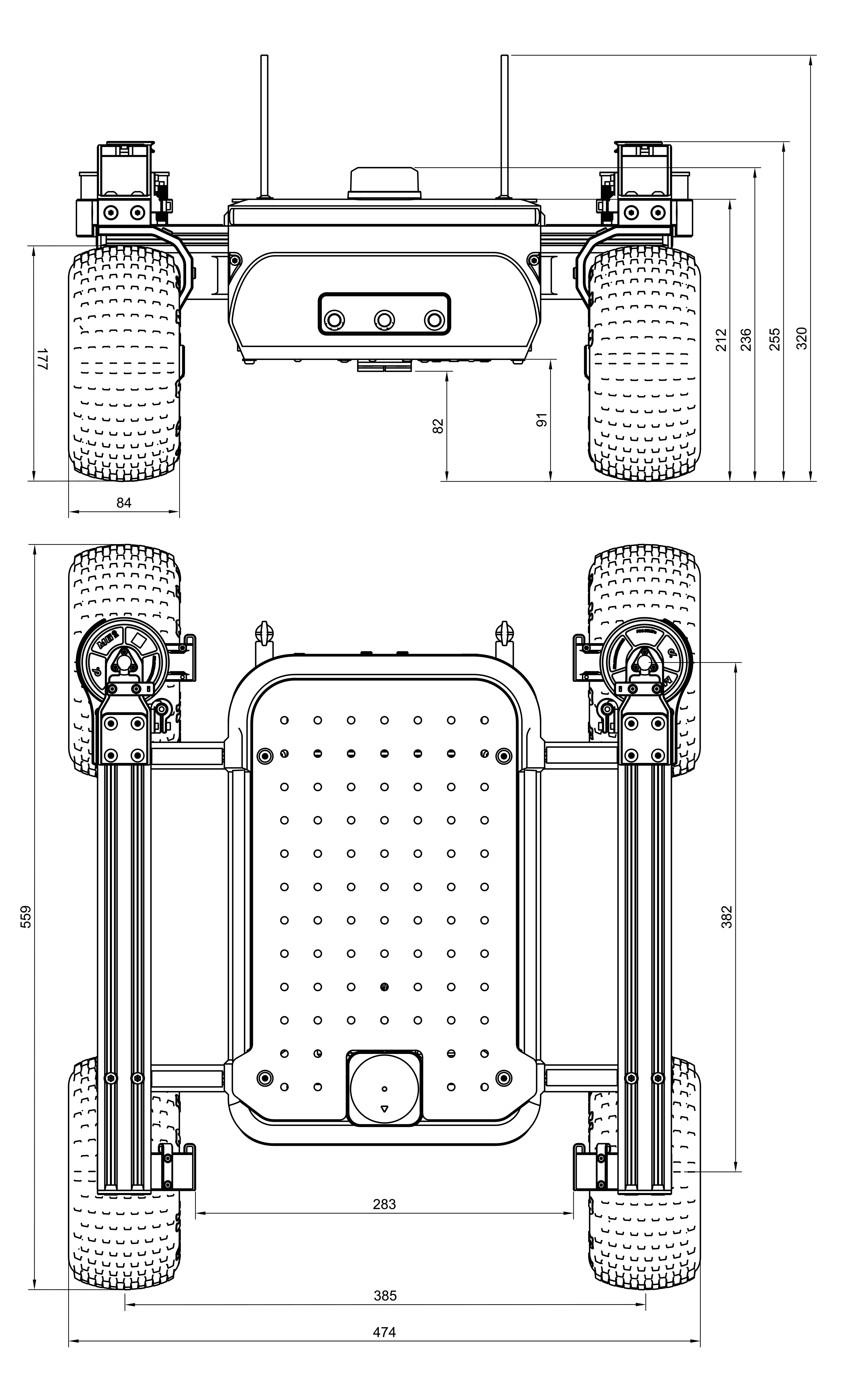
Key Components and Specifications
Dimensions
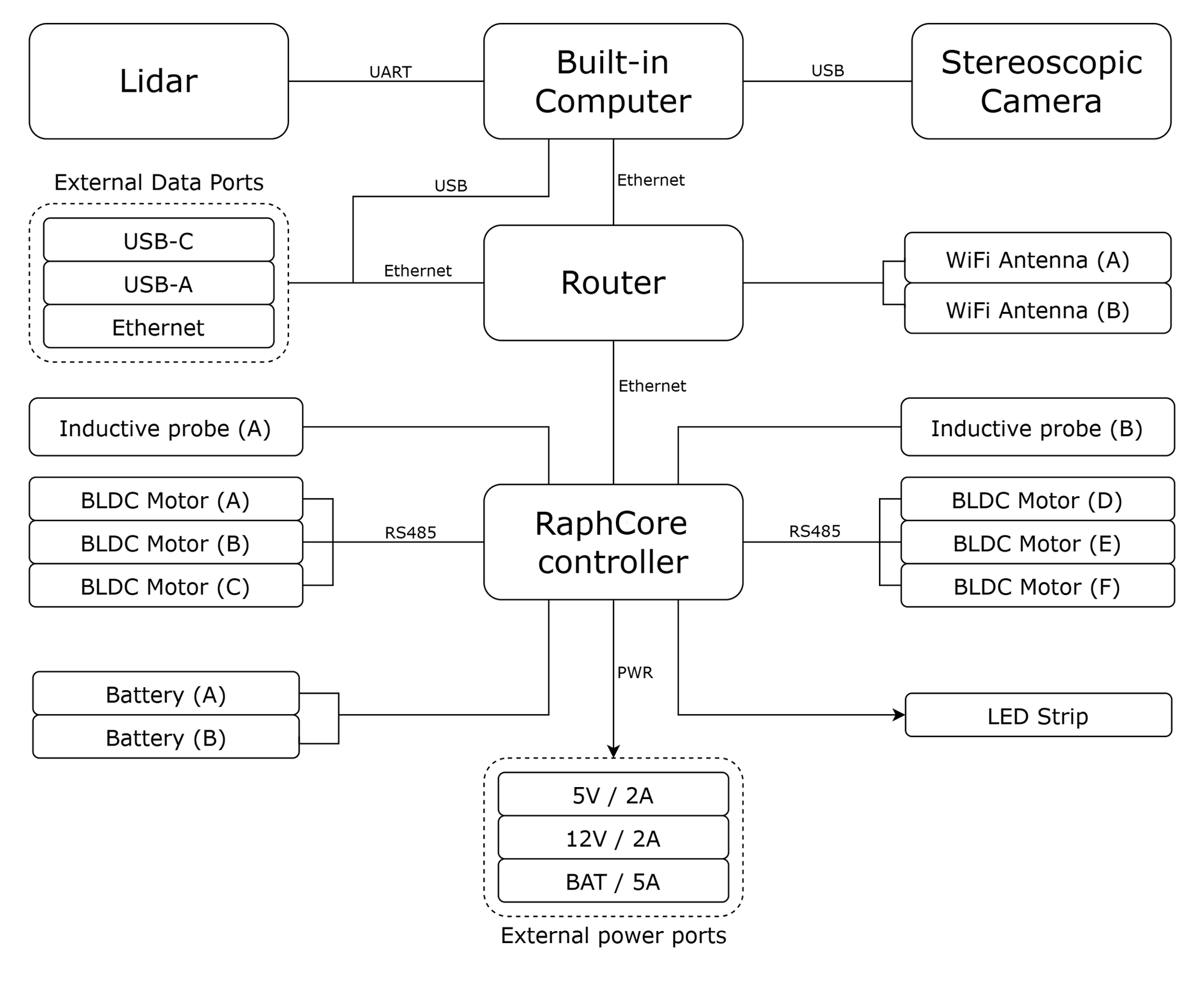
Hardware structure
Raph Rover's architecture is simple and transparent to give you maximum control. At the lowest level is the hardware layer (drives, sensors, battery). It is managed by out custom controller - RaphCore and UP7000 Single board computer with Ubuntu and ROS 2. You work at the highest layer, creating standard ROS nodes (in Python or C++)that implement your application's logic.
Main parameters
| Parameter | Value |
|---|---|
| Dimensions (LxWxH) | 559 mm x 474 mm x 255 mm |
| Weight | 12.5 kg |
| Maximum payload | 10 kg |
| Maximum linear speed | 1.8 m/s |
| Maximum angular speed | 4.7 Rad/s |
| IP protection rating | IP 54 |
| Operating temperature | -10 °C to +40 °C |
| Run time | 4 hours* |
| Connection range | Up to 100 m |
* - infinite with hot swapping batteries
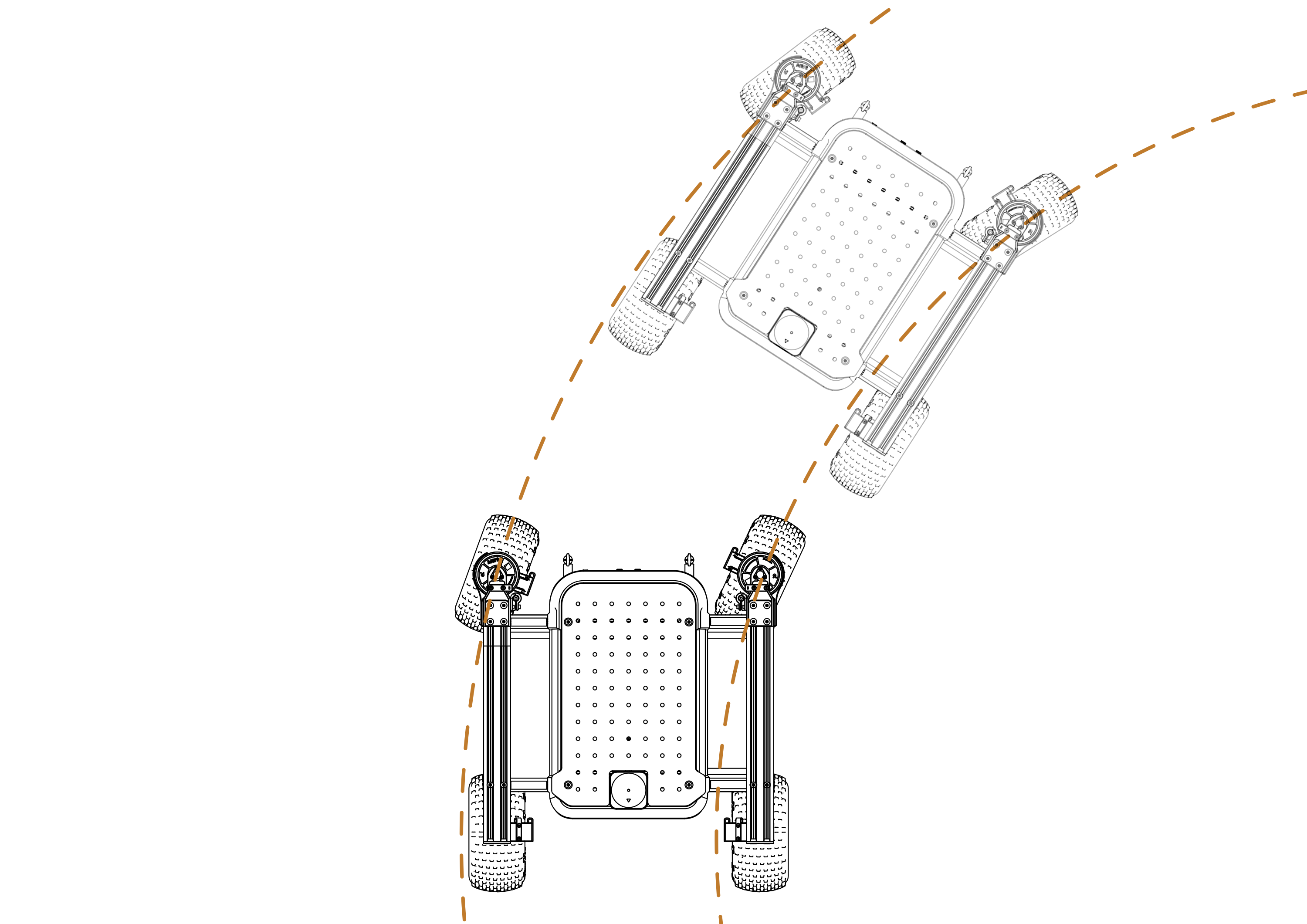
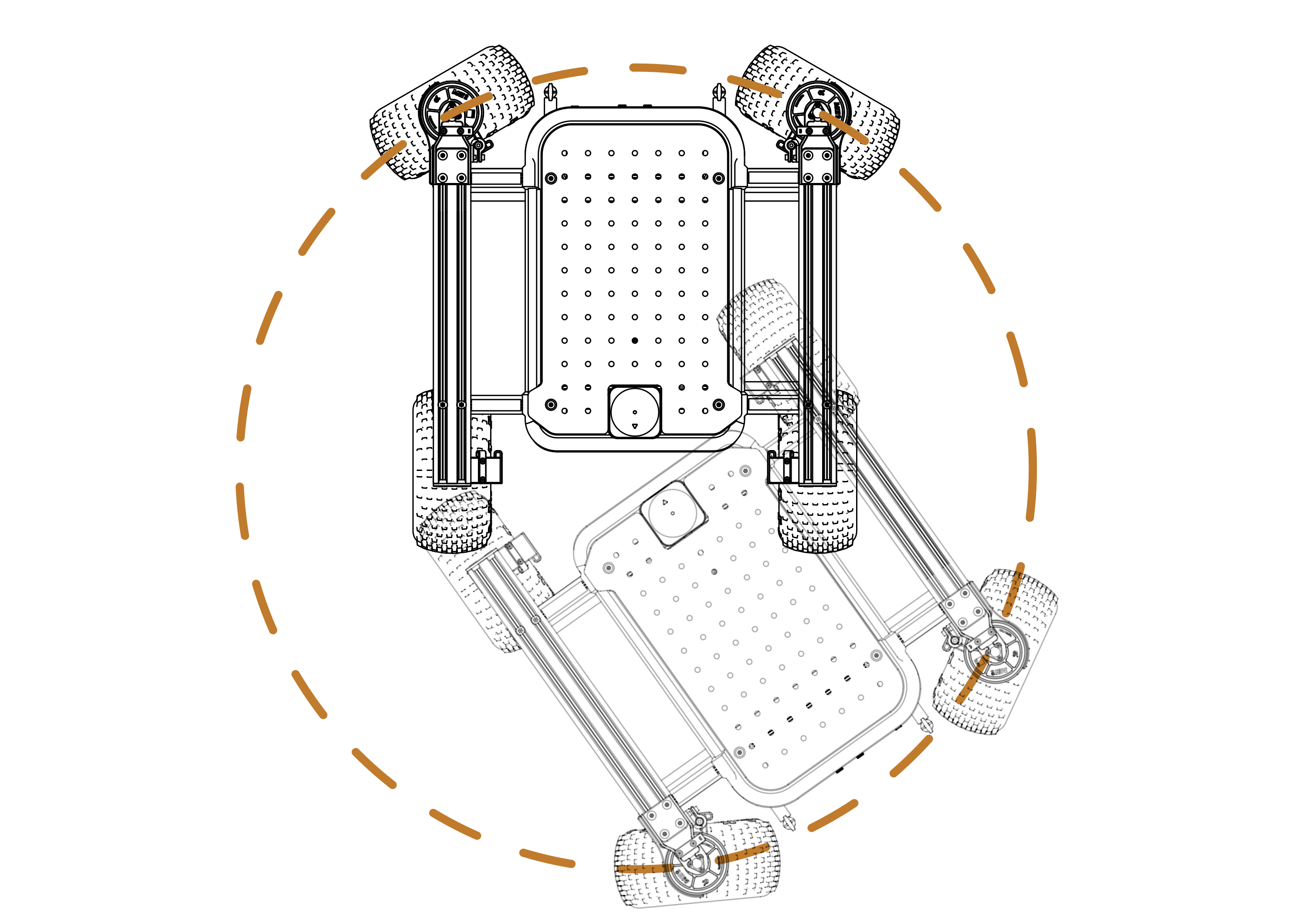
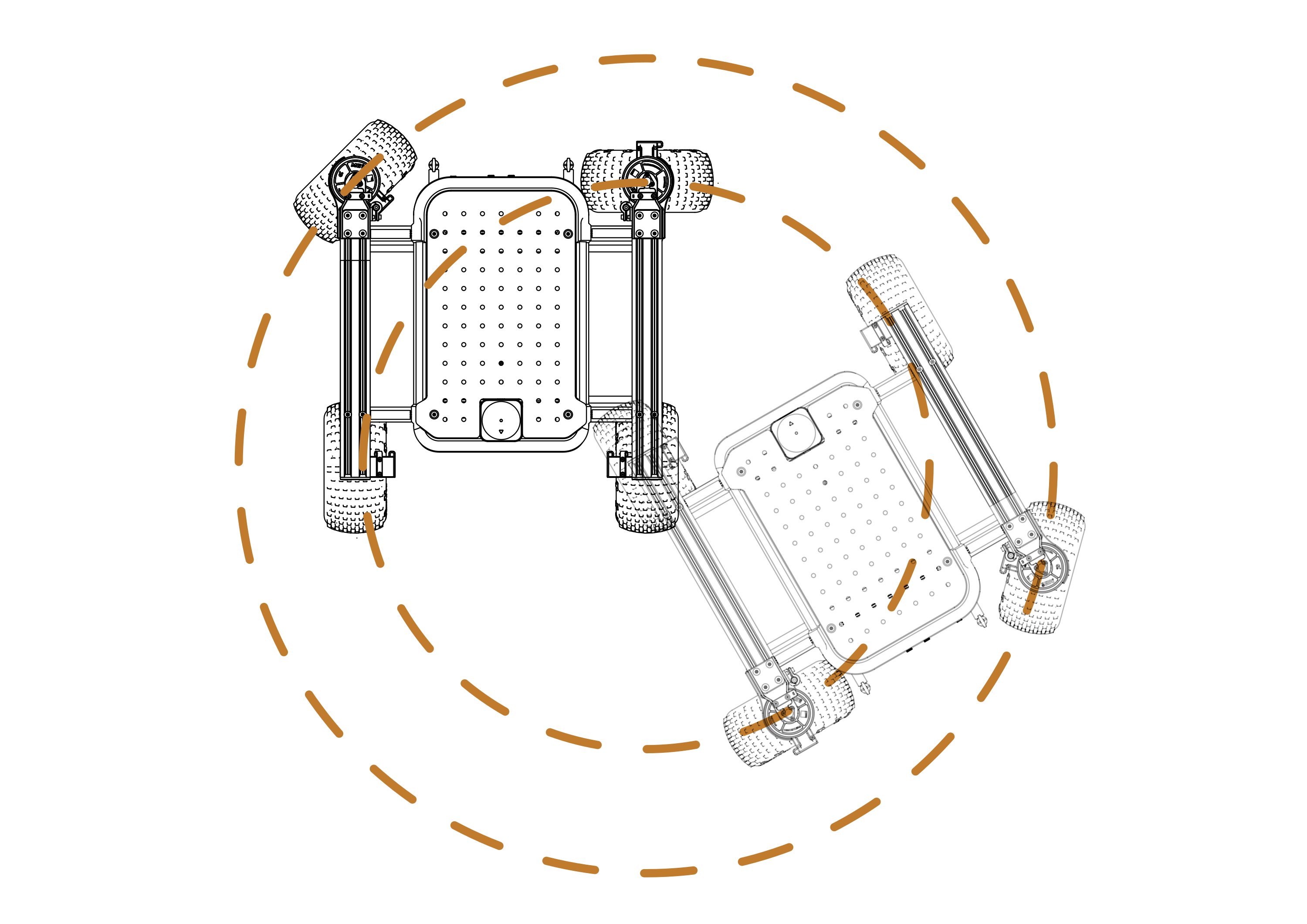
Drivetrain
With its distinctive rear-wheel steering system, Raph Rover achieves outstanding agility and accurate control.
See Full Technical Specification:
3D model
Get Started with Raph Rover
Support & community
If you get stuck or run into any issues with the robot, remember: you are not alone! Join our Discord community to access a private support channel directly with Fictionlab employees. Alternatively, you can simply contact us by email.