Autonomous docking tutorial
The advanced guides are exclusively for ROS 1. We are actively working on updating these guides to also support ROS 2.
This tutorial will guide you through the procedure of docking your Leo Rover autonomously to the charging station.
Prerequisites
Referenced products
Software integration
Preparing the environment
To be able to perform the autonomous docking, you need to install our package on your rover. For now the only way is to build it from source, so it requires a ROS workspace on your rover (if you don't have one or don't know whether there is already a workspace on your rover, you can follow this guide).
To install the package, connect to your rover through ssh, enter the src
directory inside your workspace and execute these commands:
git clone https://github.com/LeoRover/leo_docking.git
cd ..
source devel/setup.bash
rosdep install --from-paths src -iry
catkin build
Launching the software
Now that everything is ready, we can proceed to launching some software. This
whole section will describe in detail the functionalities provided in the
leo_docking package and how to use them.
Here's a brief summary of different parts of the docking software we will run:
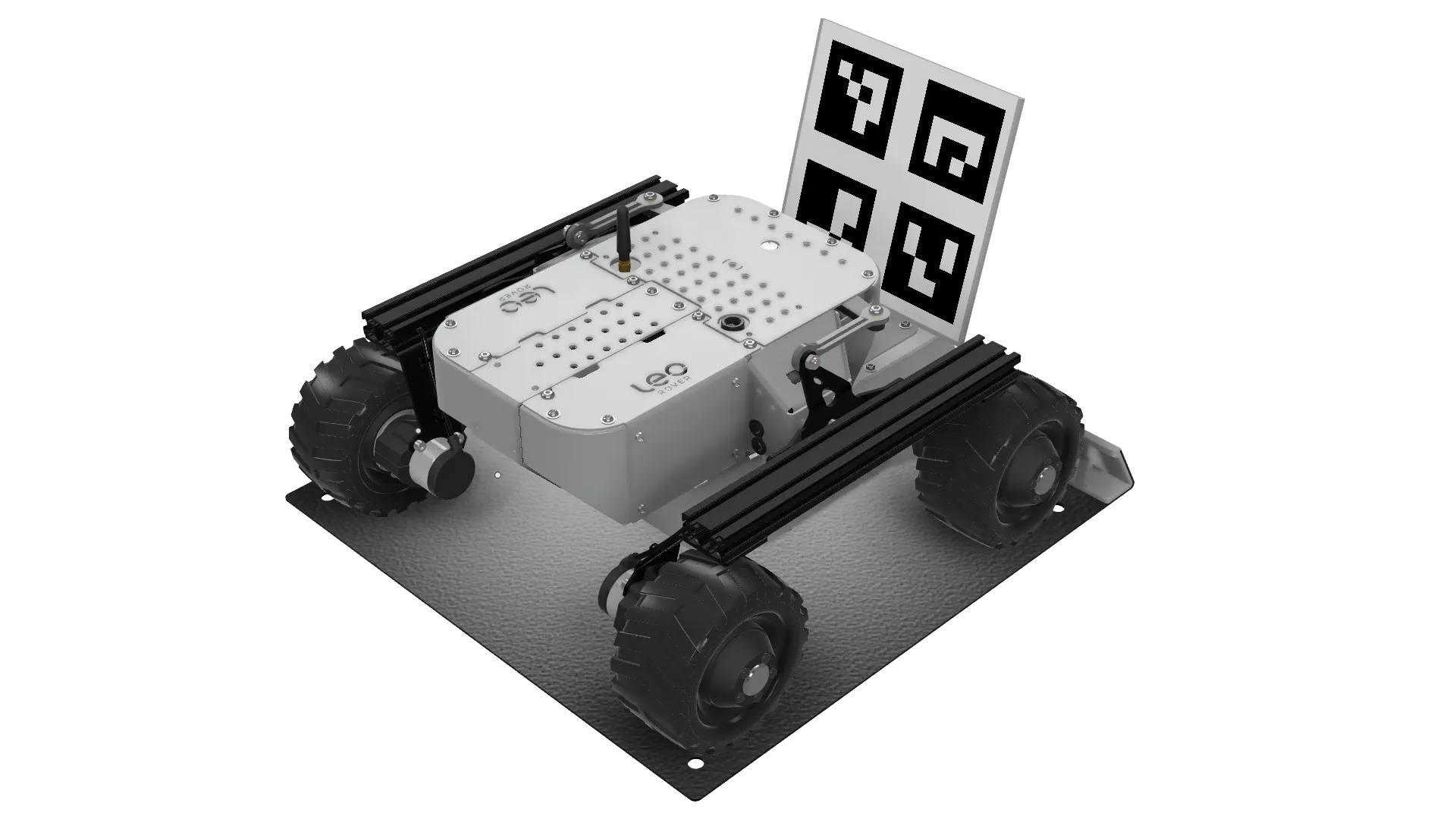
- Aruco Detector - it's necessary for detecting the charging station; provides the docking process with needed coordinates.
- Docking state machine - once we have the position of the station, it will be used to set up the rover's position regarding the station and perform docking.
- Docking Client - the way of controlling the process of the docking (starting/aborting) and getting feedback from the autonomous docking.
The first two functions are provided through the launch file located under the launch directory. All parameters for the running nodes are loaded from the YAML files located under the config directory.
The client is run with rosrun command and takes three optional arguments, but
it'll be covered later.
Detector + State Machine
As the state machine needs output from the detector, they are launched with one
file. The detector provides the state machine with the station position in the
base_link frame, and the state machine performs calculations and moves the
rover based on the results. The machine has 3 main parts:
- Reaching docking area - the machine enters this part when the rover is not able to simple dock to the station from its starting position. The task of this part is to get the rover in front of the station in some distance, facing the station.
- Reaching docking point - this part is responsible for getting the rover right in front of the charging station where it'll be possible to make final corrections in the position before riding onto the station.
- Docking - the last part of the docking process that makes the rover dock
at the station; makes the rover drive onto the station until one of three
conditions are met:
- charging is detected
- distance to the marker on the station has been reached
- the wheels are blocked on the station - the rover reached the end of the station.
Here's a diagram that illustrates the state machine:
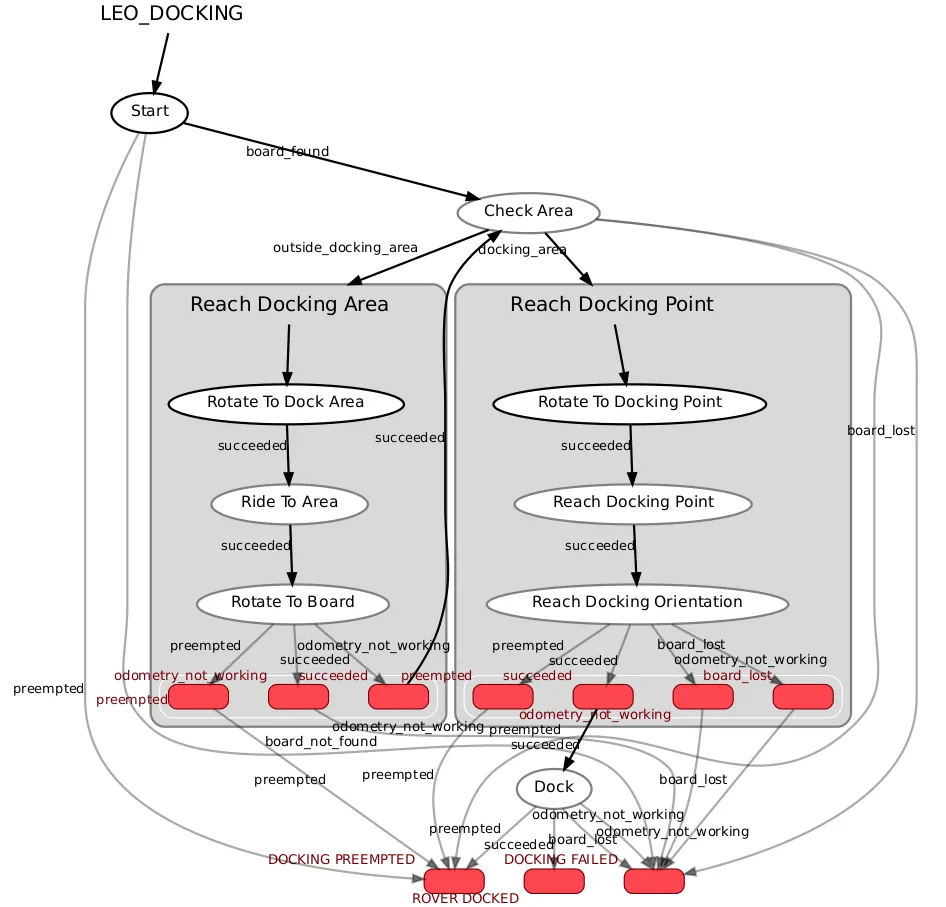
The ovals represent different states of the machine and the arrows show the transitions between the states. The two gray rectangles represent sub state machines to the main state machine.
When it comes to the parameters, there are three files in the config directory:
- board_descriptions.yaml - file containing definitions of 4 boards with aruco markers.
As the definitions are matched to the boards that we provide on the stations, it's better not to change values there if you don't know what the parameters mean.
- aruco_tracker.yaml - file containing parameters for the opencv aruco detector function and some ROS specific parameters.
It's better not to change the ROS specific parameters. For the description of the opencv detector parameters, you can visit this link.
- docking_config.yaml - file with all parameters for the state machine. You can specify there linear and angular speed of the rover in specific states, timeouts and more. Each parameter has it's comment describing what this parameter is used for. There are also a few commented params - you can uncomment them to specify the value for a given state (as long as the param is commented, the value to the state is provided from the global parameter defined in the beginning of the file).
Although you have access to every file with parameters, it would be best not to touch any of the values unless you really need to because some part of the autonomous docking doesn't suit you. But remember that with wrong parameter setup the autonomous docking might not succeed.
Having everything covered, to run the detector with the state machine, simply run on the rover:
roslaunch leo_docking dock_rover.launch
Remember to source the setup.bash file in your ROS workspace. Otherwise, the command will fail.
Docking Client
Having the software described above launched, we have the state machine ready for action, but it needs a signal to start the docking. That's where the Docking Client comes in. It's a script that sends an ID of the target charging station (the marker board on the station to be precise) to the state machine. Once the state machine gets the number, it starts the docking process. Here are all the functionalities that the docking client provides:
- Starting the docking process by sending a goal to the state machine actionlib server,
- Possibility of cancelling the docking with the ctrl+c key combination,
- Getting feedback from the state machine,
- Checking if the state machine is up or whether it stopped working during the docking process,
- Three optional command line arguments that are respectively: ID of the base, connection timeout, status check interval.
The command to run the client looks like this:
rosrun leo_docking docking_client <board_id> <timeout> <interval>
But as it was mentioned earlier, the arguments are optional, so a simple command to start the docking process is (in another terminal, with sourced workspace):
rosrun leo_docking docking_client
This will use the default values of the arguments ("1", "3", "2" respectively). Here is a customized example:
rosrun leo_docking docking_client 3 2 1.5
This command will result in the state machine trying to dock the rover to the station with ID "3", where the client will wait 2 seconds for getting connection with the state machine actionlib server and will check every 1.5 second if the server is still up.
You can also run the docking client on your host computer, but you would need to
build the leo_docking package there and connect your rover to the ROS network
running on the rover. You can do this by following
this guide.