How to Install ROS on your computer
Having ROS on your host machine has many advantages. First of all, it allows you to communicate with nodes running on your Leo Rover, so it is easier to introspect ROS network. Also, it lets you run nodes on your computer, so you can launch part of the node network in your host machine such as graphical interfaces and visualization tools.
There is a couple of ROS installation options depending on your system:
- Linux Installation
- Windows Subsystem for Linux
- Windows Native Installation
If you have Linux distribution installed (either natively or on virtual machine), you can follow instructions in ROS 2 documentation.
ROS repository contains pre-built packages for Ubuntu and Debian systems. ROS 2 Jazzy requires Ubuntu 24.04 or Debian Bookworm.
To install Windows Subsystem for Linux (WSL), open PowerShell as Administrator and run:
wsl --install -d Ubuntu-24.04
This will install WSL with Ubuntu 24.04 distribution, which is required by ROS 2 Jazzy.
To open PowerShell as Administrator, search for PowerShell in Start menu, right-click
Windows PowerShell and select Run as administrator.
Make sure that your WSL is the latest version by running:
wsl --update
To see other available Linux distributions, run:
wsl --list --online
After installation is complete the system will ask you to provide user name and password. When the credentials are set, Ubuntu will be opened in the terminal.
To launch a Ubuntu 24.04 WSL session in the future, run in PowerShell:
wsl -d Ubuntu-24.04
Alternatively, installed WSL distributions should also be available from the Start menu:
Make sure that you are in the home directory before executing further commands:
cd ~
You can now follow steps from ROS 2 installation tutorial on ROS wiki and install ROS 2 in WSL as you would on a native Linux system.
WSL 2 also supports graphical applications, so you can run RViz and other GUI tools directly in WSL by default.
In order to communicate with your Leo Rover from WSL, you need to set up mirrored mode networking.
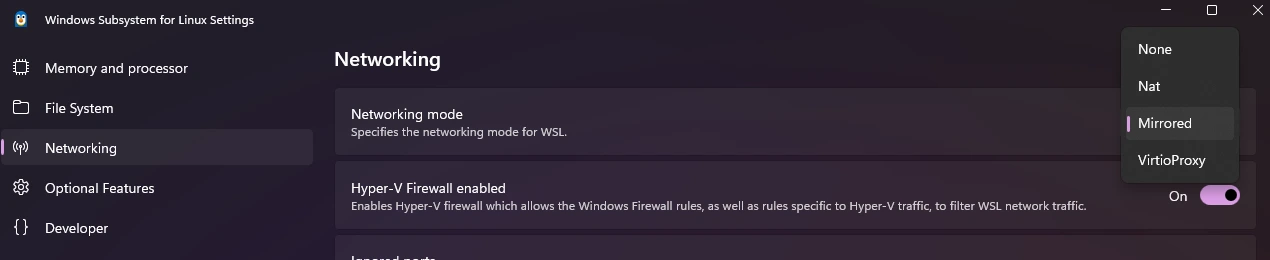
To enable mirrored mode networking, first make sure that you have closed all WSL instances and then,
from the Start menu, open Windows Subsystem for Linux Settings, navigate to Networking tab
and set Networking mode to Mirrored:
Mirrored networking is not supported in Windows 10.
Next, you need to change firewall settings to allow WSL to access the network.
Open PowerShell as Administrator and run:
Set-NetFirewallHyperVVMSetting -Name '{40E0AC32-46A5-438A-A0B2-2B479E8F2E90}' -DefaultInboundAction Allow
Your WSL instance should now have ROS installed and have access to the network.
ROS 2 can be installed on Windows by following instructions in ROS 2 documentation.
Please note that native Windows support of ROS 2 is limited and is not supported as well as Linux or WSL installations. We highly recommend using Windows Subsystem for Linux instead.
In order to be see nodes and topics running on your Leo Rover, make sure that your computer is connected to rover's access point.